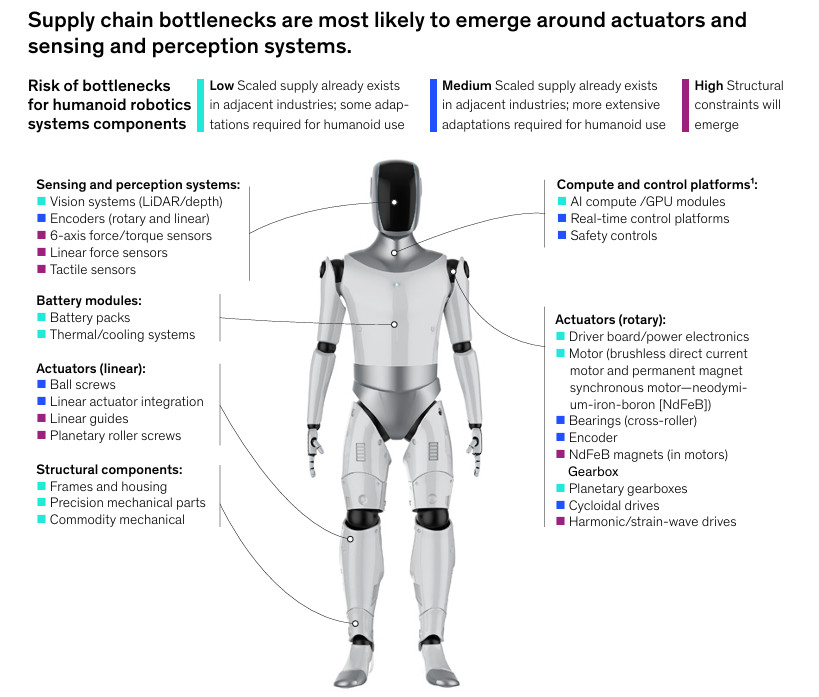
在人形机器人的价值量构成中,执行器占比最高。以特斯拉的人形机器人为例, 线性执行器价值量占比约为28.9%,旋转执行器占比约为20%。线性执行器主要由丝杠和无框力矩电机组成,其中丝杠的价值量占比约为20%,无框力矩电机占比接近6%。旋转执行器则由无框力矩电机、谐波减速器、行星减速器以及驱动 和编码器构成,其中无框力矩电机是主要成本部分。传感器价值量占比约为17%, 其中一维力传感器和 IMU 占比较高。灵巧手的成本占比约为14%,其技术路径仍持续迭代中,主要构成包括空心杯电机和触觉传感器等,是技术难度最高且尚未收敛的关键环节之一。





![[笑着哭]错过“光"了,错过了许多“过去”千万别再错过机器人](http://image.uczzd.cn/10892283177606582366.jpg?id=0)